
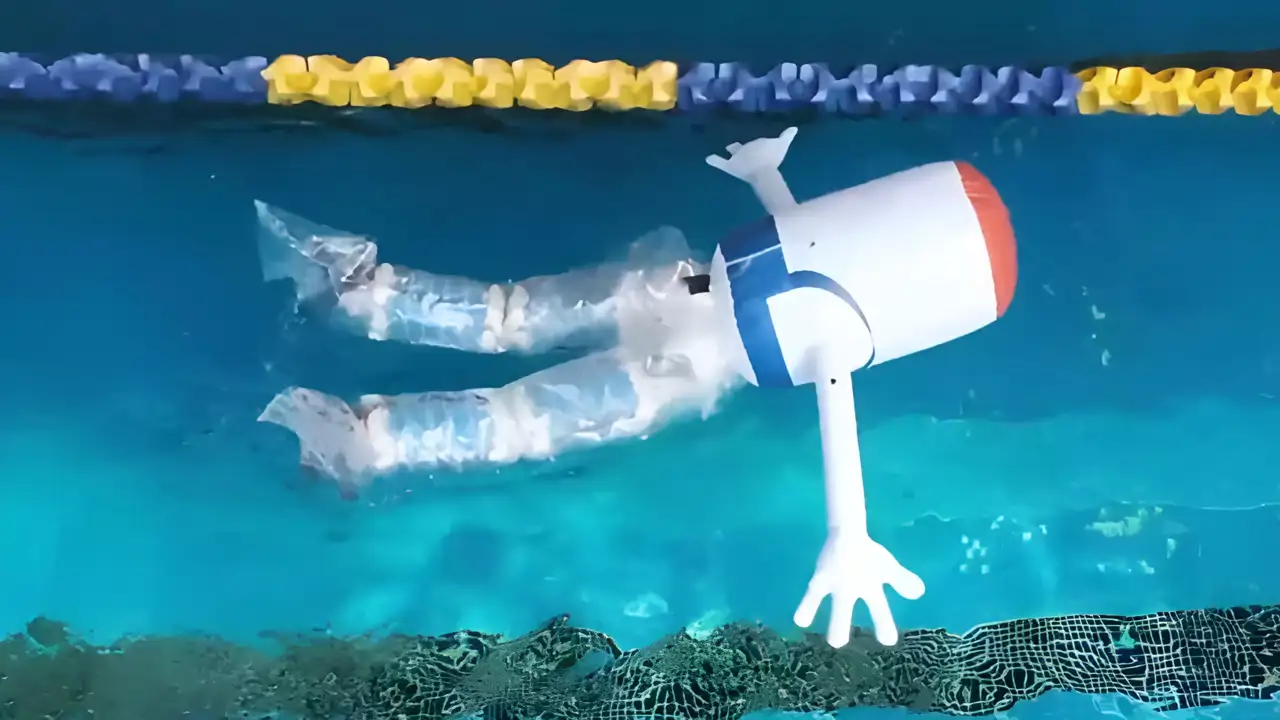
La robótica da un salto sin precedentes con GrowHR, un robot blando capaz de adaptarse a múltiples entornos y modos de movilidad. Este humanoide experimental puede nadar bajo el agua, volar por los aires y desplazarse sobre la superficie de ríos o lagos, funciones que hasta ahora eran inimaginables en un solo dispositivo.
El secreto de GrowHR reside en su estructura flexible y adaptable, que le permite cambiar de forma según las necesidades del entorno. A diferencia de los robots tradicionales, este diseño blando le brinda la capacidad de transformar su configuración interna, generando movimientos suaves y precisos en distintos medios, desde el agua hasta el aire.
Según los desarrolladores, la clave de su versatilidad es la combinación de materiales blandos y control avanzado, lo que le permite alternar entre caminar, nadar y vølar con un solo sistema integrado. Esta multimodalidad abre la puerta a un tipo de robótica nunca antes vista en el mercado, con aplicaciones que van más allá de la experimentación.
El robot también destaca por su capacidad de interacción con entornos complejos, manteniendo estabilidad y movimiento incluso sobre superficies inestables o líquidas. Este nivel de adaptación lo convierte en un candidato ideal para misiones de exploración, ręscate en zonas inundadas y estudios ambientales donde los robots convencionales tienen limitaciones.
GrowHR se perfila como un avance significativo en la robótica blanda y versátil, un campo que busca imitar la flexibilidad y adaptabilidad de organismos vivos. Gracias a su diseño innovador, los investigadores pueden estudiar nuevas formas de movilidad y eficiencia energética, acercando la robótica a escenarios cada vez más impredecibles y naturales.
Aunque todavía se encuentra en fases experimentales, su potencial es enorme. El desarrollo de GrowHR demuestra cómo la fusión de ingeniería, materiales flexibles y control robótico avanzado puede romper barreras de movilidad, estableciendo un nuevo estándar para los robots del futuro.
Con información de: National Geographic
")


")
")
")

")

")
{kind=link}